数字速度计以每小时英里为单位显示车辆速度。在某些情况下,感应速度会在两个整数值之间波动,例如在使用巡航控制时。使用单一阈值在相邻整数之间进行舍入,往往会导致显示数值在两个整数之间快速切换,这会分散驾驶员的注意力。
您的团队必须实现一种平滑技术,通过使用单独的上升阈值($t_r$)和下降阈值($t_f$)来处理显示。请参阅图 1,了解根据以下规则使用样例输入时的图形描述。
每个感应速度 $s$ 都落在两个相邻整数 $i$ 和 $j$ 之间,即 $i \le s < j$,其中 $j = i + 1$。当将感应速度 $s$ 显示为整数时:
- 当 $s$ 落在 $i$ 和 $i + t_f$ 之间时,$s$ 显示为 $i$。
- 当 $s$ 落在 $i + t_r$ 和 $j$ 之间时,$s$ 显示为 $j$。
- 当 $s$ 落在 $i + t_f$ 和 $i + t_r$ 之间时,如果最近一次落在区间 $[i + t_f, i + t_r]$ 之外的 $s$ 值小于 $i + t_r$,则 $s$ 显示为 $i$;如果最近一次落在区间 $[i + t_f, i + t_r]$ 之外的 $s$ 值大于 $i + t_r$,则 $s$ 显示为 $j$。
- 任何感应速度 $0 < s < 1$ 都必须显示为 $1$,因为任何非零速度(无论多小)都必须显示为非零值,以表明车辆处于运动状态。
输入格式
输入的第一行包含下降阈值 $t_f$。第二行包含上升阈值 $t_r$。速度传感器以 $0.1$ mph 的增量报告速度 $s$。阈值始终设置在速度增量的中间。其余所有行直到文件结束均为连续的十进制速度 $s$(单位为每小时英里),每行一个速度。输入的第三行(即第一个测量速度)始终为 $0$。
$0 < t_f, t_r < 1; \quad t_f < t_r; \quad 0 \le s \le 120$
输出格式
输出为速度列表,每行一个速度,平滑处理为适合 $t_f$ 和 $t_r$ 的整数值。
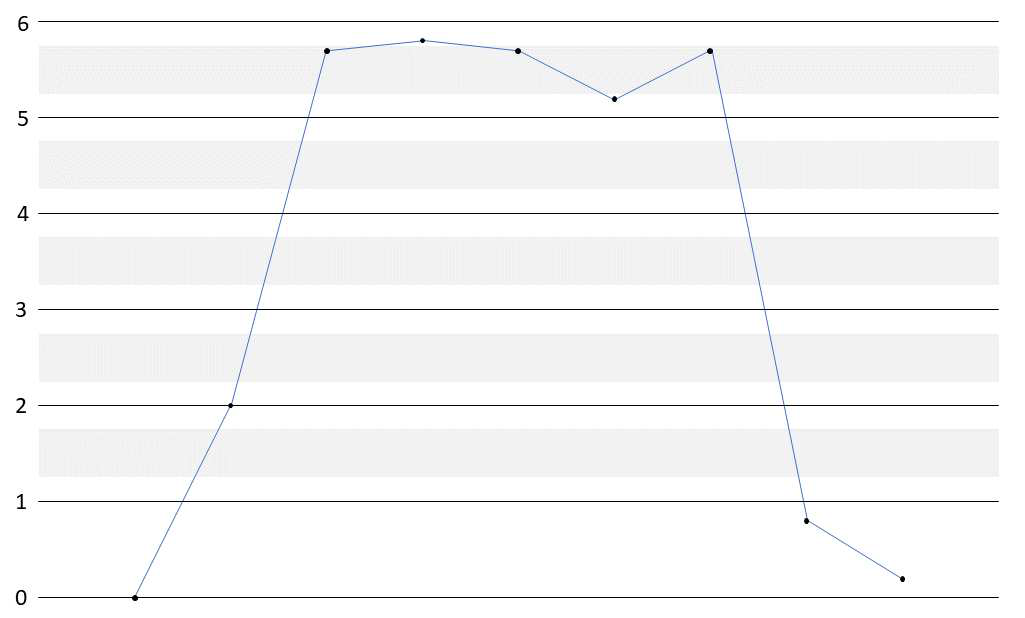
图 1. 样例输入的传感器读数,其中 $t_f = 0.25$ 且 $t_r = 0.75$。
样例
输入 1
0.25 0.75 0 2.0 5.7 5.8 5.7 5.2 5.7 0.8 0.2
输出 1
0 2 5 6 6 5 5 1 1
说明
| 输入 | 输出 | 说明 |
|---|---|---|
| 0.25 | $t_f$ 的值。 | |
| 0.75 | $t_r$ 的值。 | |
| 0 | 0 | 初始输入。 |
| 2.0 | 2 | 输入大于 0,在阈值范围之外。 |
| 5.7 | 5 | 输入大于 2.0,在阈值范围内。 |
| 5.8 | 6 | 输入大于 2.0,超过上限阈值 5.75。 |
| 5.7 | 6 | 输入小于 5.8,在阈值范围内。 |
| 5.2 | 5 | 输入小于 5.8,低于阈值范围 5.25。 |
| 5.7 | 5 | 输入大于 5.2,在阈值范围内。 |
| 0.8 | 1 | 输入大于 0 且小于 1。 |
| 0.2 | 1 | 输入大于 0 且小于 1。 |