Jiajia 想要在他的双眼机器人上做一些实验。机器人的每只眼睛都会射出一束极细的激光,激光会无限延伸(即数学上的“射线”)。受限于内部结构,两只眼睛射出的激光必须始终保持直角(即两条射线必须互相垂直)。
为了帮助机器人定位,Jiajia 放置了两个线段形状的特殊材料,分别称为 MA 和 MB。如果其中一条射线与 MA 相交,而另一条射线与 MB 相交,机器人就能收集到足够的空间信息进行定位。
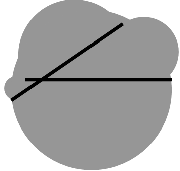
机器人可以进行自我定位的点集。
上图中奇怪的形状就是机器人可以进行自我定位的点集。MA 和 MB 被画成两条线段。
虽然这个任务看起来有点困难,你能告诉我这些点的总面积吗?
输入格式
最多有 50 组测试数据。每组数据包含一行 8 个不超过 500 的正整数 $x_1, y_1, x_2, y_2, x_3, y_3, x_4, y_4$,其中 $(x_1, y_1)$ 和 $(x_2, y_2)$ 是 MA 的两个端点,$(x_3, y_3)$ 和 $(x_4, y_4)$ 是 MB 的两个端点。注意 MA 和 MB 最多只有一个公共点。MA 和 MB 都不会退化为点。最后一组测试数据后跟有 8 个零,这组数据不应被处理。
输出格式
对于每组测试数据,输出“可自我定位点”的总面积,保留小数点后 3 位。每组测试数据的输出后打印一个空行。
样例
输入 1
264 280 147 360 162 335 320 334 203 165 288 227 149 295 153 344 0 0 0 0 0 0 0 0
输出 1
Case 1: 26634.633 Case 2: 27436.383