Pang 教授买了一个人形清洁机器人来打扫他的院子。这个机器人不太智能,它每次只能选择向前移动或者改变方向,所有动作都由 Pang 教授的控制器控制。
Pang 教授的院子是一个二维平面。机器人需要从当前位置 $A$ 移动到目的地 $B$,以完成 Pang 教授的一些“清洁”需求。然而,Pang 教授的院子里有两条直线墙壁 $CD$ 和 $EF$。由于机器人很笨拙,如果它碰到任何一堵墙(即使是在端点处),它就会摔倒。
现在 Pang 教授很懒,他想最小化机器人改变方向的次数。你能帮帮他吗?
输入格式
第一行包含一个整数 $T$ ($1 \le T \le 10^5$),表示测试用例的数量。
对于每个测试用例,第一行包含两个整数 $x_A, y_A$,表示点 $A$ 的坐标。第二行包含两个整数 $x_B, y_B$,表示点 $B$ 的坐标。第三行包含四个整数 $x_C, y_C, x_D, y_D$,表示第一堵墙的端点 $C$ 和 $D$ 的坐标。第四行包含四个整数 $x_E, y_E, x_F, y_F$,表示第二堵墙的端点 $E$ 和 $F$ 的坐标。
保证机器人的当前位置 $A$ 和目的地 $B$ 都不在任何墙壁上。墙壁可能会退化为一个点。可以证明,机器人总是可以从 $A$ 移动到 $B$ 而不碰到任何墙壁。所有数值都在 $[-10^9, 10^9]$ 范围内。
输出格式
对于每个测试用例,输出一行一个整数 $d$,表示最少的转向次数。
样例
输入 1
3 0 0 1 1 2 2 3 3 4 4 5 5 0 0 1 1 2 2 3 3 2 2 3 3 0 0 10 10 10 0 0 10 1 1 2 2
输出 1
0 0 1
说明
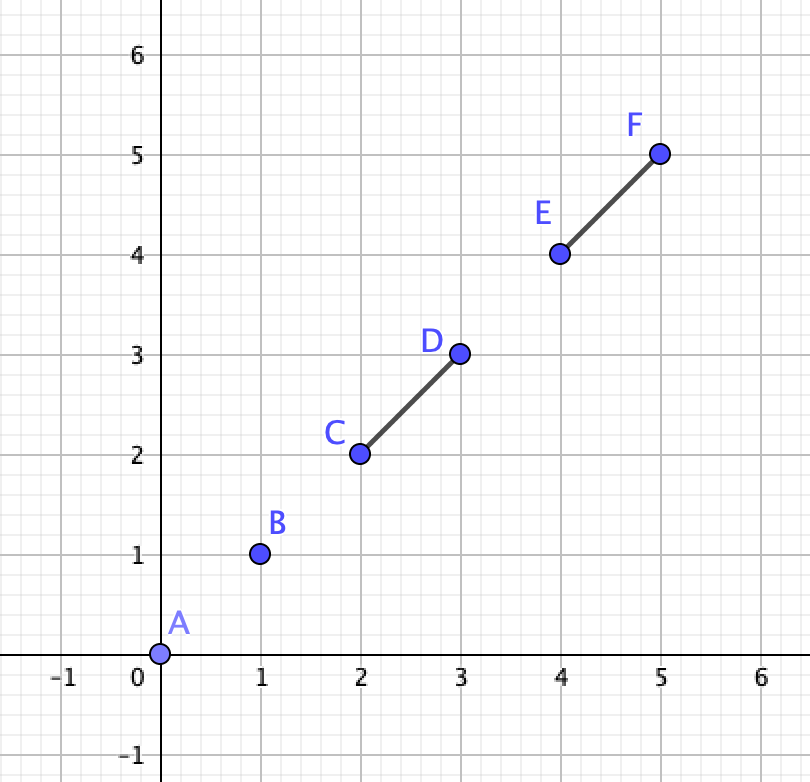
下图展示了第一个样例和第三个样例。