LaLa 的妹妹 LiLi 正在帮助 LaLa 施展召唤精灵的魔法。
在 LaLa 睡觉时,LiLi 已经构建了一个待召唤精灵的原型。该精灵由 $N$ 个魔法关节组成,这些关节允许连接到它们上面的任何魔法棒绕其自由转动;此外还有 $M$ 根各种颜色的魔法棒,每根魔法棒连接两个魔法关节,其长度可以在召唤前(但不能在召唤后)调整为任何非负实数。
在召唤精灵时,LaLa 的标准远高于 LiLi。当然,LaLa 对 LiLi 的工作一点也不满意。LaLa 想要通过去掉一些魔法棒来美化这个原型,使得:
- 精灵是“美观”的,这意味着不存在两根颜色相同的魔法棒,并且
- 精灵尽可能易于控制,这意味着在通过消除一些魔法棒所能获得的所有美观精灵中,该精灵的自由度必须最小。注意,最小值总是存在的,因为她总是可以消除所有魔法棒来创造一个美观的精灵。关于自由度的确切定义,请参阅下文的说明。
编写一个程序,计算 LaLa 美化后的精灵的自由度。
输入格式
输入描述了 LiLi 制作的精灵原型,格式如下:
$N$ $M$ $u_0$ $v_0$ $c_0$ $u_1$ $v_1$ $c_1$ $\vdots$ $u_{M-1}$ $v_{M-1}$ $c_{M-1}$
其中 $N$ 是魔法关节的数量,编号从 $0$ 到 $N-1$,$M$ 是魔法棒的数量,对于每个整数 $0 \le i < M$,第 $i$ 根魔法棒的颜色为 $c_i$,连接魔法关节 $u_i$ 和 $v_i$。
输入满足以下约束:
- 所有输入数字均为整数。
- $2 \le N \le 200$
- $0 \le M \le 1\,000$
- 对于所有整数 $0 \le i < M$,满足 $0 \le u_i < v_i < N$ 且 $0 \le c_i < M$
注意:可能存在多根魔法棒连接同一对魔法关节。
输出格式
输出应为一个单一整数,等于 LaLa 美化后的精灵的自由度。
样例
样例输入 1
3 3 0 1 0 0 2 0 1 2 0
样例输出 1
5
样例输入 2
3 3 0 1 0 0 2 1 1 2 2
样例输出 2
3
样例输入 3
4 4 0 1 0 1 2 1 2 3 2 0 3 3
样例输出 3
4
样例输入 4
5 4 0 1 0 1 2 1 2 3 2 3 4 3
样例输出 4
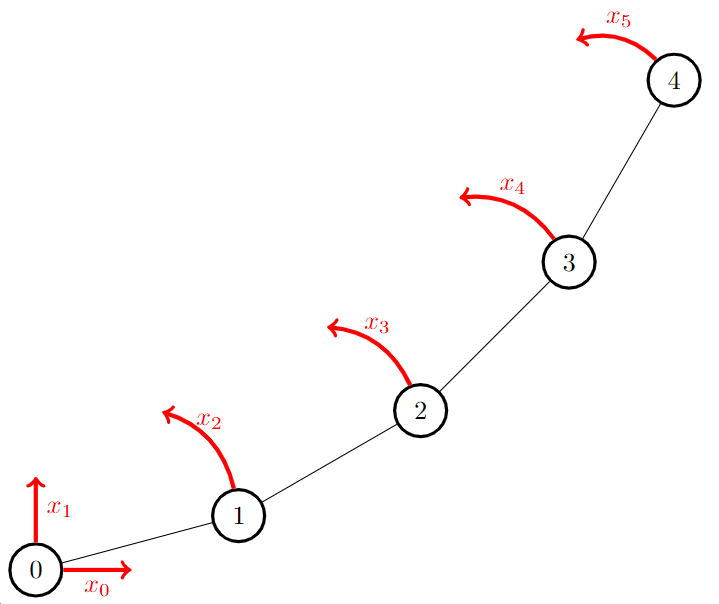
6
说明
直观地说,自由度是嵌入在平面上的精灵保持边长不变的运动轴的数量。
更正式地,设 $E$ 为精灵所有魔法关节的平面坐标分配(我们称之为嵌入)。注意,这样的嵌入可以通过连接所有坐标被识别为 $\mathbb{R}^{2N}$ 中的一个元素,其中 $N$ 是魔法关节的数量。
设 $C(E)$ 为从 $E$ 出发,在保持边长不变的情况下,作为 $\mathbb{R}^{2N}$ 中的元素可以连续到达的所有嵌入的集合。即对于 $C(E)$ 中的每个元素 $E'$ 以及精灵中连接魔法关节 $u$ 和 $v$ 的每根魔法棒,在 $E$ 和 $E'$ 中 $u$ 与 $v$ 之间的欧几里得距离必须相同。
$E$ 的自由度是最小的非负整数 $k$,使得存在一个连续双射映射 $F : D \to C(E)$,其中 $D$ 是 $\mathbb{R}^k$ 的一个连通子集。
精灵的自由度是所有此类嵌入 $E$ 中的最大自由度。
以下按顺序展示了 LaLa 美化后的精灵,以及每个样例测试中一个最优嵌入和对应的映射 $F$。
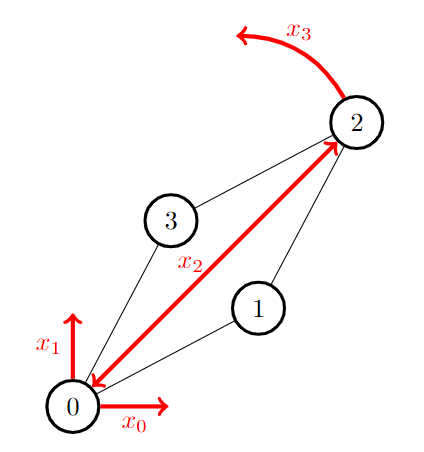
- $k = 5, D = \mathbb{R}^2 \times [0, 2\pi) \times \mathbb{R}^2$ $F : (x_0, x_1, x_2, x_3, x_4) \mapsto \langle(x_0, x_1), (x_0, x_1) + (\cos x_2, \sin x_2), (x_3, x_4)\rangle$ 下图展示了与每个变量相关的 5 个自由度。
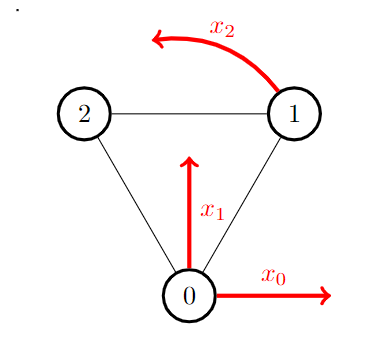
- $k = 3, D = \mathbb{R}^2 \times [0, 2\pi)$ $F : (x_0, x_1, x_2) \mapsto \langle(x_0, x_1), (x_0, x_1) + (\cos x_2, \sin x_2), (x_0, x_1) + (\cos (\frac{\pi}{3} + x_2), \sin (\frac{\pi}{3} + x_2))\rangle$ 下图展示了与每个变量相关的 3 个自由度。
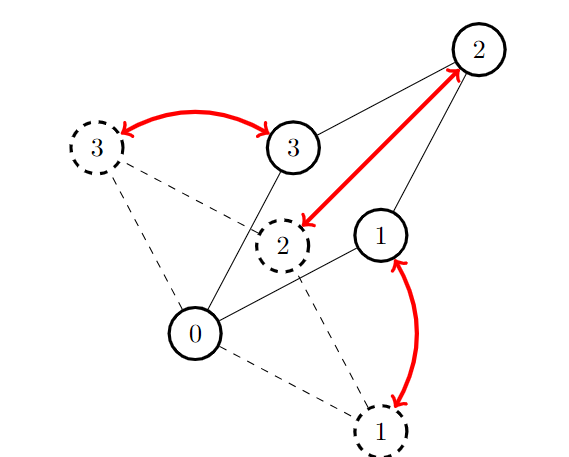
- $k = 4, D = \mathbb{R}^2 \times (((0, 2] \times [0, 2\pi)) \cup (\{0\} \times [0, \pi)))$ $F : (x_0, x_1, x_2, x_3) \mapsto \langle P_0, P_0 + \frac{x_2}{2} P_1 + \sqrt{1 - \frac{x_2^2}{4}} P_2, P_0 + x_2 P_1, P_0 + \frac{x_2}{2} P_1 - \sqrt{1 - \frac{x_2^2}{4}} P_2 \rangle$ 其中 $P_0 = (x_0, x_1), P_1 = (\cos x_3, \sin x_3)$ 且 $P_2 = (\sin x_3, -\cos x_3)$。 左图展示了与每个变量相关的 4 个自由度。注意与变量 $x_2$ 相关的运动是非刚性的。右图详细展示了与 $x_2$ 相关的运动。
- $k = 6, D = \mathbb{R}^2 \times [0, 2\pi)^4$ $F : (x_0, x_1, x_2, x_3, x_4, x_5) \mapsto \langle P_0, P_1, P_2, P_3, P_4 \rangle$ 其中 $P_0 = (x_0, x_1)$ 且对于所有整数 $1 \le i \le 4$,$P_i = P_{i-1} + (\cos x_{i+1}, \sin x_{i+1})$。 下图展示了与每个变量相关的 6 个自由度。