一家无人驾驶汽车公司在二维笛卡尔平面上拥有一个矩形实验场。其四条边均平行于坐标轴。该场地的左下角坐标为 $(x_l, y_l)$,右上角坐标为 $(x_r, y_r)$。
矩形内部严格包含两条线段 $A$ 和 $B$。$A$ 和 $B$ 没有公共点。平面上还有一辆可以看作点的汽车。它将从矩形边界上的点 $S$ 出发,移动到矩形内部的某个位置,最后停在矩形边界上的另一个点 $T$。实验要求汽车在移动过程中的任何时刻(包括汽车位于 $S$ 和 $T$ 时),汽车到线段 $A$ 的距离必须等于汽车到线段 $B$ 的距离。此外,$S$ 和 $T$ 必须是两个不同的点。点 $P$ 到线段 $Q$ 的距离定义为 $P$ 到 $Q$ 上任意一点的最小欧几里得距离。
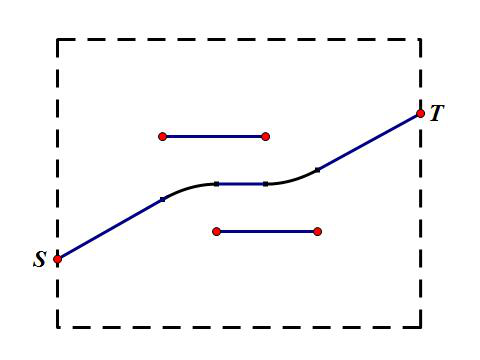
上图对应样例测试
请编写一个程序,帮助公司找到一条合法的汽车移动路径,使得路径长度最小,或者确定不存在合法的路径。
输入格式
输入包含多组测试数据。输入的第一行包含一个整数 $T$ ($1 \le T \le 10^5$),表示测试数据的组数。
对于每组数据,第一行包含四个整数 $x_l, y_l, x_r, y_r$ ($-1000 \le x_l < x_r \le 1000$, $-1000 \le y_l < y_r \le 1000$),表示矩形左下角和右上角的坐标。接下来的两行,每行包含四个整数 $x_1, y_1, x_2, y_2$,表示一条连接 $(x_1, y_1)$ 和 $(x_2, y_2)$ 的线段,其中 $x_1, x_2 \in [x_l + 1, x_r - 1]$ 且 $y_1, y_2 \in [y_l + 1, y_r - 1]$。
对于每组数据,保证每条线段的两个端点不重合,且这两条线段没有公共点。
输出格式
对于每组数据,如果存在合法的路径,输出一行,包含一个实数,表示路径的最小长度。否则,输出数字 $0$。如果你的答案与标准答案的绝对误差或相对误差不超过 $10^{-9}$,则被视为正确。
形式上,如果你的答案是 $a$,标准答案是 $b$,则当且仅当 $\frac{|a-b|}{\max\{1,|b|\}} \le 10^{-9}$ 时,你的答案被视为正确。
样例
输入 1
1 0 0 7 6 2 4 4 4 3 2 5 2
输出 1
7.552593593868681136