一辆自动驾驶车辆 $V$ 在如下图所示的巨型工厂中行驶,工厂内有垂直和水平的道路。道路要么是水平线段,要么是垂直线段。一条垂直道路和一条水平道路最多相交一次。如果它们相交,则它们是正交相交的,即所有交点都是十字路口。线段的端点坐标均为整数。
车辆 $V$ 在 $t=0$ 时从某条道路的一个端点出发,并根据驾驶算法以每秒一个单位的速度移动。$V$ 沿着道路直线行驶,直到遇到两条道路的交点或道路的尽头。如果到达交点,它会在该交点处左转。如果到达道路尽头,它会在该尽头处折返,并继续根据算法移动。即使车辆回到起点,它也会永远移动下去。车辆在道路尽头折返或在交点处左转所需的时间忽略不计。
让我们通过图 A.1(a) 中的例子来解释。车辆的起点是端点 $a$。它首先到达交点 $b$,左转并向端点 $c$ 移动。它在 $c$ 处折返并再次到达 $b$。然后它左转并沿着 $b$ 和 $d$ 之间的部分移动。它到达另一个交点 $d$ 并向 $e$ 左转,依此类推。如图 A.1(b) 所示,由于算法的转向规则,线段的某些部分不会被车辆经过,即使车辆回到起始端点,它也会继续移动。
给定工厂的道路、车辆 $V$ 的起始端点以及一个非负时间 $t$,编写一个程序来计算 $V$ 在时间 $t$ 时的位置坐标 $(x, y)$。
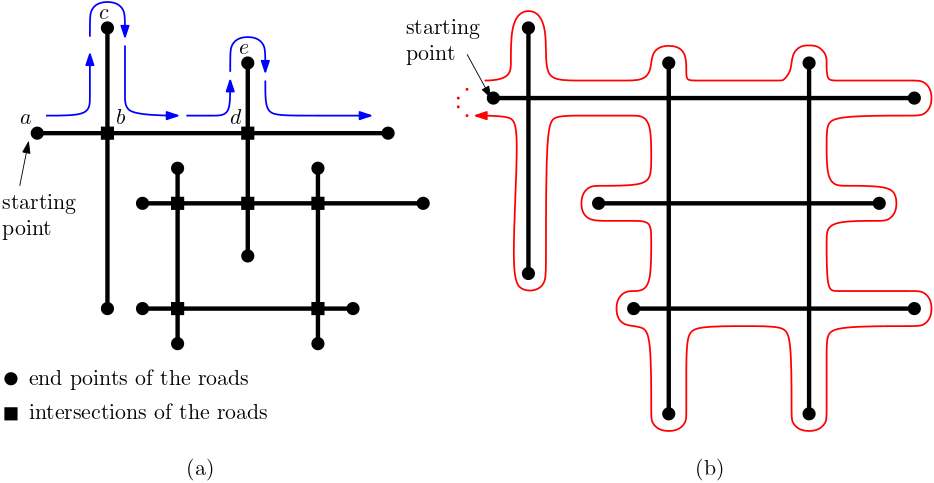
图 A.1 (a) 工厂中的道路。(b) 车辆回到起点。
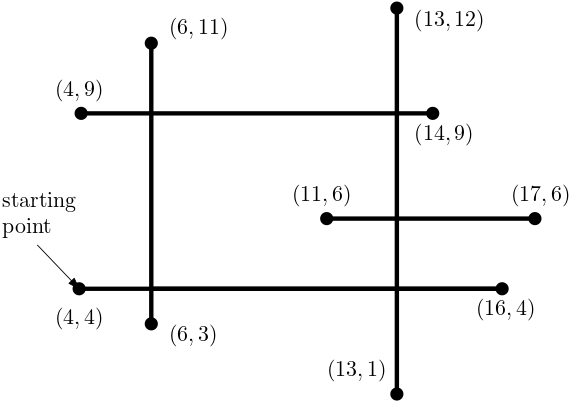
图 A.2 下面第二个样例测试用例中给出的道路。
输入格式
程序从标准输入读取数据。输入的第一行包含两个整数 $n$ ($2 \le n \le 500$) 和 $t$ ($0 \le t \le 10^9$),其中 $n$ 是道路的数量(即线段的数量),$t$ 是需要输出车辆位置的时间。在接下来的 $n$ 行中,第 $i$ 行包含四个非负整数 $bx_i, by_i, ex_i, ey_i$,表示一条(水平或垂直)线段的两个端点 $(bx_i, by_i)$ 和 $(ex_i, ey_i)$。两条线段最多相交于一点。车辆的起始端点指定为 $(bx_1, by_1)$。所有端点坐标均在 $0$ 到 $10^7$ 之间。没有道路共享端点。
注意:道路线段不一定连通,且所有交点均为十字路口。
输出格式
程序将结果写入标准输出。打印两个整数 $x$ 和 $y$,表示车辆在时间 $t$ 时的坐标 $(x, y)$。
样例
样例输入 1
5 33 4 4 16 4 4 9 14 9 6 11 6 3 11 6 17 6 13 12 13 1
样例输出 1
13 6
样例输入 2
5 70 4 4 16 4 4 9 14 9 6 11 6 3 11 6 17 6 13 12 13 1
样例输出 2
6 6